Well, for the clock, I have a working prototype. I’ve purchased three (3) 3D printers, largely to support this issue, but my most recent Bambu Lab X1-Carbon printer is incredible, so I can stop bumming time on my company’s model. I’ll try to upload a video below to demonstrate it’s functionality as well as highlight some issues.
However, with the working prototype comes the glaring errors. The most major of which is a lack of positional feedback on the hands. I’ll explain.
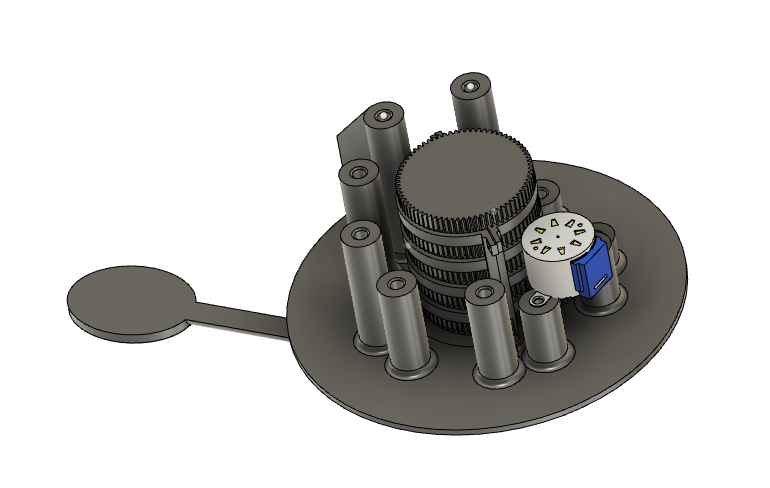
My current mechanics involve using these 28BYJ-48 Stepper motors to drive the stack of gears. However, the mounting points are parallel with the drive motor, meaning I need to support them from below and making it difficult to stack the motors vertically. This means I have to space the motors around the central gear stack. There is really not much room left for access to the gear stack.
Also, the motor support towers are not stiff enough and flex quite easily, making the gears skip and de-mesh causing errors or failures in the movements.
Additionally, the program needs to know where the hands are, in order to know how much to turn them when a location changes. Right now, I have a rotary encoder that allows manual changes on startup of the clock, with the idea being that you would manually position the hands to a calibration point, making them all point exactly vertical for example, and then the program would know where they started and can just keep track of the changes.
However, small errors in positioning and tracking would compound and eventually the clock would read completely wrong. Additionally, it requires calibration every startup and upon every software error, which with my programming skills is currently often. It’s just not a feasible long-term solution.
I would like to use limit switches, gap sensors, or Hall Effect sensors to provide automatic calibration and feedback, however, there’s just no space to access the gearstack easily.
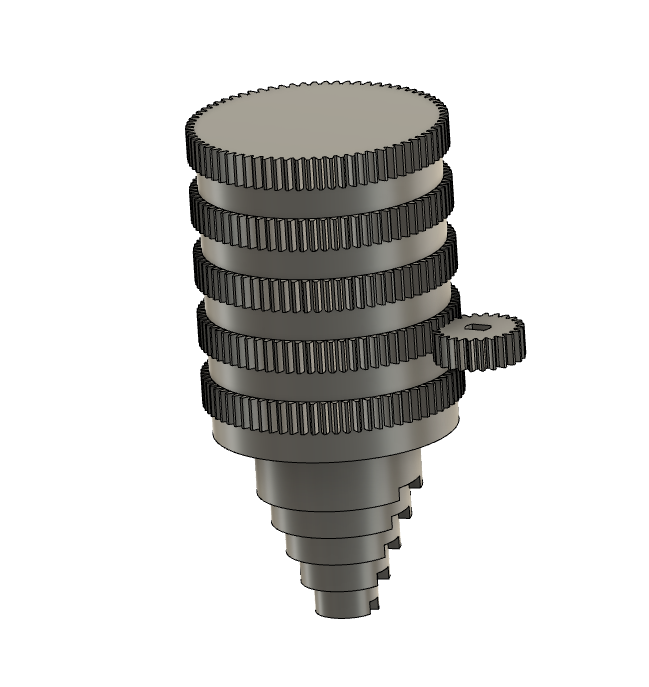
The idea

The key? Bevel gears. If I turn the motors ninety degrees, I can much more easily stack them vertically and contain them to maybe half the circumference of the gear stack. That leaves so much more room for activities and active feedback mechanisms. It has a slew of other smaller benefits as well. However, it will be more difficult to design, much more difficult to 3D print, and require a complete redesign of essentially every part. Am I willing to throw away all my design work so far, with my deadline of May approaching ever faster?

I guess so.
(It doesn’t look like much but I think it’s really cool.)